Cross-Compiling for the Omega
Cross compilation just means compiling an executable meant for a platform that’s different from the one on which the compilation is being performed. In this case, you will be using your computer, which likely runs on the x86 instruction set, to compile an executable for the Omega, which runs the MIPS instruction set.
The OpenWRT build system is at the core of our cross compilation efforts; it will build to toolchain which we will then use to cross compile our C or C++ code for the Omega.
In the article on using a C compiler on the Omega, it is mentioned that a limitation of compiling on the Omega is that the compiled programs are limited to using only the C standard libraries since only those header files are included on the Omega’s filesystem as a space-saving measure.
The main advantage to cross compiling as opposed to compiling a program directly on your Omega is two-fold:
your program will be able to use libraries other than the implemented by other OpenWRT software packages, and,
the compilation will likely be much quicker on your computer in the cross compilation environment than on the Omega.
This article will explain how to setup the OpenWRT build system, explain what needs to be done in order to cross compile a program, and then go through an example of cross compilation.
Setting Up the Build System
The build system can be used to build the cross compilation toolchain, create full firmware images, and create software packages that can be installed with opkg. This article focuses only on building the cross compilation toolchain.
Note: Onion is not responsible for any damage or issues caused by using firmware or packages that do not originate from Onion.
To start, we will need to setup the OpenWRT build system on your computer, configure it for the Omega, and then build the toolchain. We’ve had success with this procedure on Ubuntu Linux, we strongly recommend following suit. Use a virtual machine if you don’t have a native installation.
Our guide is loosely based on OpenWRT’s own build system installation instructions, check their instructions out if something is unclear.
System Setup
The OpenWRT build system requires quite a few packages, in your Linux environment, run the following command:
sudo apt-get install -y git wget subversion build-essential libncurses5-dev zlib1g-dev gawk flex quilt git-core unzip libssl-dev python-dev python-pip libxml-parser-perlThis may take some time!
Downloading the OpenWRT Build System
Use git to download the build system customized by Onion for the Omega2:
git clone https://github.com/OnionIoT/source.gitThis will take some time but not nearly as much as the previous step!
Build System Setup
Ok, now we need to setup the build system so that it’s configured for the Omega2 and Omega2+.
Since you’re using the Onion-customized build system, this part will already be done and you can skip down to the Compilation step. We’ve left the instructions here in case you’re using the original OpenWRT build system.
Go into the source directory and start the build system menu:
cd source
make menuconfig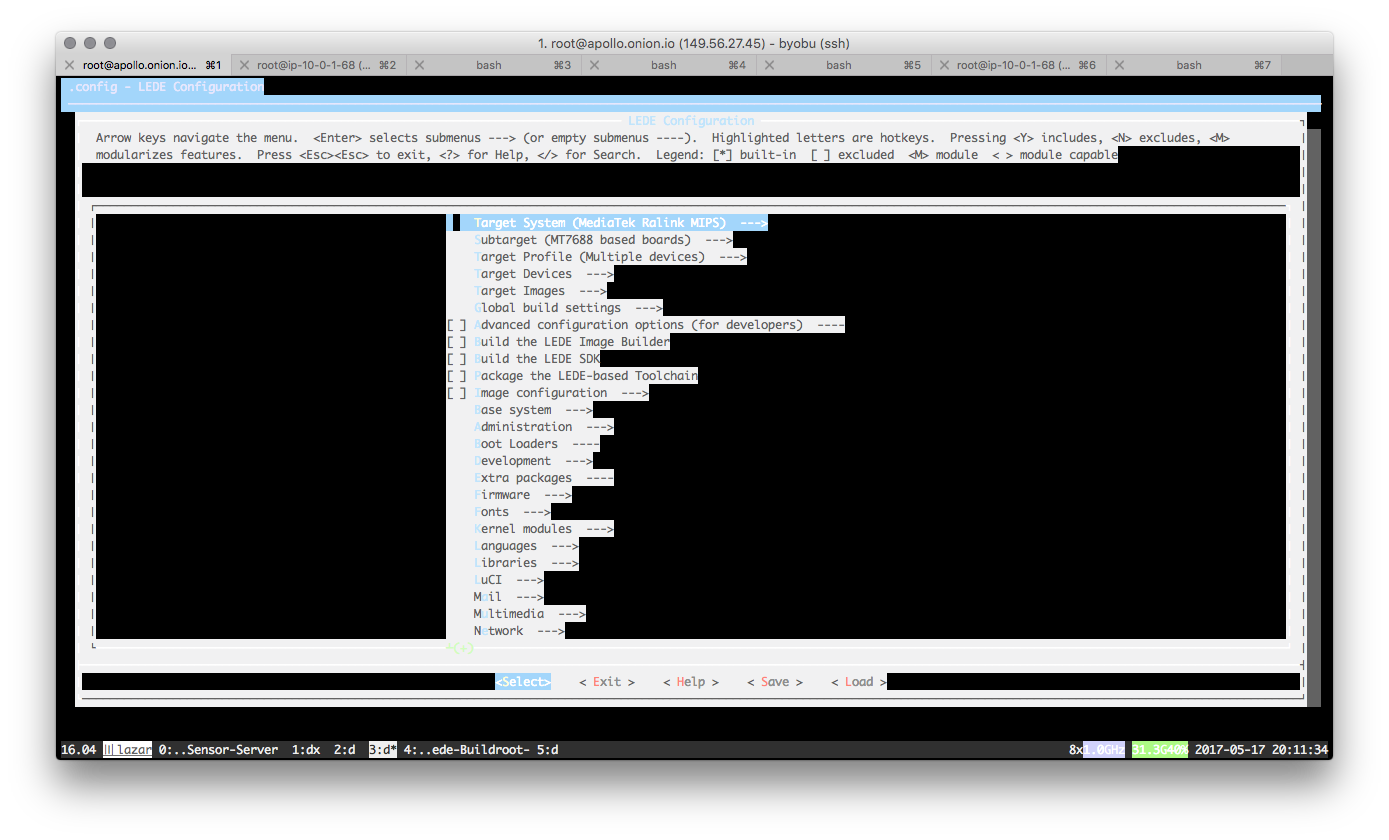
In the menu that appears, you will need to do the following:
- For
Target System, selectMediaTek Ralink MIPS - For
Subtarget, selectMT7688 based boards - For
Target Profile, selectMultiple Devices - A new item will appear on the Main menu,
Target Devices - For
Target Devices, selectOnion Omega2andOnion Omega2+ - Exit and save your configuration
Now your OpenWRT build system is configured to create a toolchain, firmware, and packages that are compatible with the Omega2 and Omega2+!
Compilation
The only thing that’s left is to compile the toolchain. The build system is based on makefiles, so a simple command will start the process:
makeIf you have a bleeding edge processor that can handle a bunch of threads, you can use the following command:
make -j8Where the 8 defines the number of compilation jobs to run simultaneously.
Depending on your system, the compilation will take quite some time and be very resource intensive, be patient! On server-grade systems, compilation will take about half an hour, on regular desktop or laptop systems it may take hours.
Cross Compiling
Now that the toolchain is built, we can use it to cross compile our own programs.
Concepts & Locations
Let’s first cover a few important concepts and locations of the compiled build system.
The Toolchain:
- The toolchain is the cross compiler and standard library that we will use to compile code for the Omega
- Note that the cross compiler is specific to the processor type!
- The toolchain can be found in the
staging_dirdirectory with a name following the pattern:staging_dir/toolchain-<CPU-ARCHITECTURE>_gcc-<GCC-VERSION>_<C-LIBRARY-NAME>/- In our case it’s:
staging_dir/toolchain-mipsel_24kc_gcc-5.4.0_musl/
- In our case it’s:
- All of our compilation tools can be found at:
staging_dir/toolchain-mipsel_24kc_gcc-5.4.0_musl/bin/, this includes:mipsel-openwrt-linux-armipsel-openwrt-linux-g++mipsel-openwrt-linux-gccmipsel-openwrt-linux-gcc-nmmipsel-openwrt-linux-gcc-ranlibmipsel-openwrt-linux-gdbmipsel-openwrt-linux-ld
- The
staging_dir/toolchain-mipsel_24kc_gcc-5.4.0_musl/include/directory holds all of the header files for the C standard library - And the
staging_dir/toolchain-mipsel_24kc_gcc-5.4.0_musl/libdirectory holds the C standard library shared objects
The Target:
- The target holds everything the build system needs to
- The target can be found in the
staging_dirdirectory with a name following the pattern:staging_dir/target-<CPU-ARCHITECTURE>_<C-LIBRARY-NAME>/- In our case it is:
staging_dir/target-mipsel_24kc_musl/
- In our case it is:
- Header files of libraries added as packages can be found in the
staging_dir/target-mipsel_24kc_musl/usr/include/directory- This is important as our code will likely use header files from this location
- Shared objects for the libraries added as packages can be found in the
staging_dir/target-mipsel_24kc_musl/usr/lib/directory- This is important since code that uses these libraries needs to be linked to these shared objects during compilation
The Cross Compilation Process
The process for cross compiling is straight-forward, we just need to ensure the following things when compiling:
- We’re using the cross compiler version of
gcc/g++ - We’re using the cross compiler version of the linker
- The compiler flags extend the include search path to include:
- The toolchain header directory,
staging_dir/toolchain-mipsel_24kc_gcc-5.4.0_musl/include/ - The target header directory,
staging_dir/target-mipsel_24kc_musl/usr/include/
- The toolchain header directory,
- The linker flags extend the library search path to include:
- The toolchain library shared object directory,
staging_dir/toolchain-mipsel_24kc_gcc-5.4.0_musl/lib - The target library shared object directory,
staging_dir/target-mipsel_24kc_musl/usr/lib/
- The toolchain library shared object directory,
The additions to the include search path let the compiler know to also check in those directories when looking for header files that are #include-ed in your program. Similarly, the additions to the library search path let the compiler/linker know to also check in those directories when looking for shared object files.
The above requirements can be achieved in several different ways:
- Directly using the cross compiler and libraries
- Writing a Makefile that does all of the above
- Writing a generic Makefile and a script to invoke the Makefile with all of the above configured
See this cross-compilation guide for ideas on how to accomplish the first two method. See our example below on how to implement the third method.
A Cross Compilation Example
This example will illustrate how a C project can be cross compiled for the Omega using a generic Makefile and a script to invoke the Makefile such that it outputs a cross-compiled binary executable. The code for the example is available in Onion’s c-cross-compile-example repo on GitHub.
The C program uses the libugpio library to read and print the input value on a user-specified GPIO pin once a second for 20 seconds. As previously mentioned, this program cannot be compiled on the Omega since only the C standard library header files are included on the Omega’s filesystem. We could copy over the header files to the Omega but cross compilation is the better and more scalable option.
If you take a look at the Makefile in the repo, you’ll notice that the compiler and all of the flags are variables. The significance of this will become clear when you take a look at the xCompile.sh script. The script does the following:
- Maps out the paths to the:
- Cross compiler toolchain
- Library headers
- Library shared objects
- Generates the flags for extending the include and library search paths
- Invoke the Makefile with the compiler, flags, and libraries to link overridden with the above
To accomplish this the user needs to run the script with arguments that define where the OpenWRT build system can be found and which libraries need to be linked:
sh -buildroot <path to buildroot> -lib <list of additional libraries to link in compile>For this example program, assuming the OpenWRT build system can be found at /root/source, the command would be as follows:
sh xCompile.sh -buildroot ~/source/ -lib ugpioThis will result in a cross compiled executable, gpioRead.
Let’s take a closer look at it:
root@b6b5a4128ee3:~/c-cross-compile-example# file gpioRead
gpioRead: ELF 32-bit LSB executable, MIPS, MIPS32 rel2 version 1, dynamically linked, interpreter /lib/ld-musl-mipsel-sf.so.1, not strippedSuccess! We’ve cross compiled a program for the Omega! Transfer the file to your Omega, use chmod +x gpioRead to give it executable permissions, and run it with ./gpioRead.